




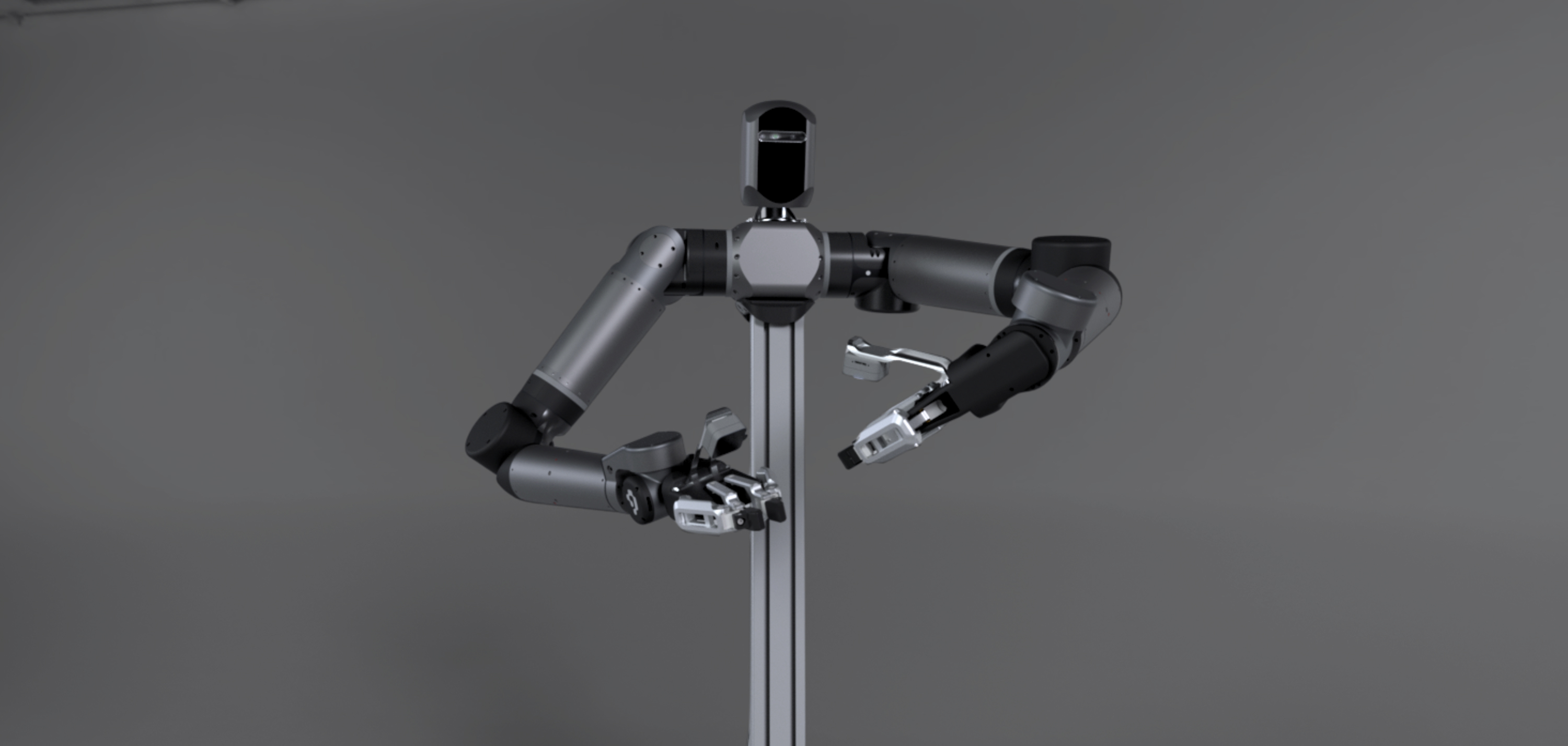
Engineered to Excel
Advanced robotics and intelligent sensing meet robust mobility in PR-OMNI—built for performance.


Arm Length – 800 mm

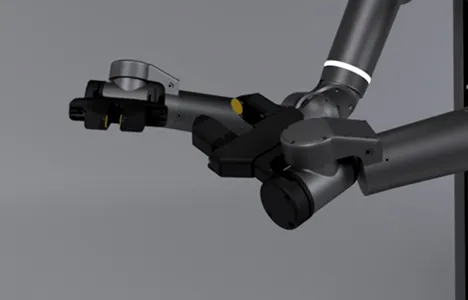
Payload - 5kg each arm


NUC- Nvidia Jetson Orin


3 RGBD cameras

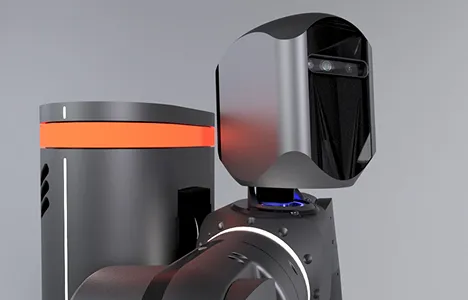
Torque sensing in all joints , Least Count of Force Sensing ( +-10g)
7 DOF
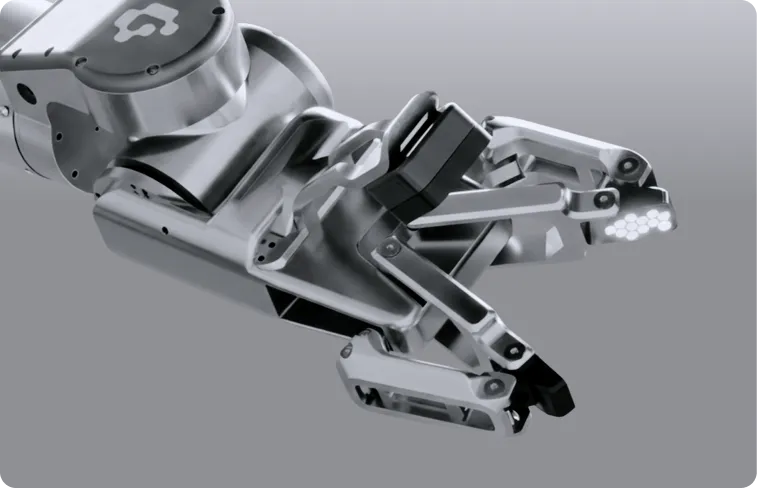
Tactile Sensing at End Effectors
Dual arms, coordinating like humans- Duo gives you the compactness and versatility you need to automate in tight spaces.
/Specifications
Here’s where you’ll find PR-OMNI’s complete DNA; every spec and feature that makes it powerful, adaptable, and future-ready.
Core Build
Height
5’2”
Weight
120 kg
Body Material
Aluminium
Design
Human form factor, modular design
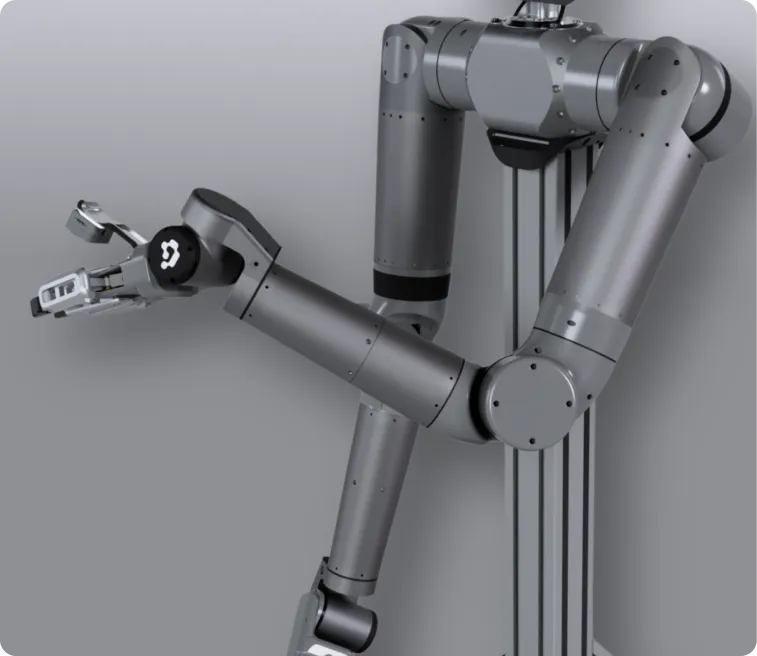
Arms
Dual arms, 7 DOF each
Arm Reach
800 mm
Sensing & Intelligence
Joint Sensors
Force-torque sensing at every joint
End-Effector Sensors
Tactile sensing
Source model
Natively running all open-source models
Visual Servo
Enabled
Technology Layer
Native Physical Intelligence Layer
Performance & Power
Vertical Gantry Range
800 mm
Max Vertical Approach Speed
1 m/s
Additional Features
Teleoperation
VR headset compatibility (Pico4)

